
In Part 1 we added the TSDZ2 Motor onto Phil’s hand Trike, and were just waiting on a display cable to be able to test it fully on the very customisable open source firmware.
In the meantime Phil popped down to the hub to give the trike a quick test with the stock motor setup and screen stuffed into his jacket ( a very Heath Robinson setup) as expected this did give power on the flats but the response of the stock motor was not ideally suited to the hand trike when on hills and the motor would quickly stop on the returning stroke. This in effect would cause terrible hunting and quickly you would loose all momentum.
I did expect this as the TSDZ2 drive is a torque sensing drive and the response is directly proportional to the pressure applied to the pedals. With a conventional bike with two offset cranks each half rotation provides a force that is measured by the motor, multiplied by the assist level and a resulting power output is calculated and sent to the motor. So in effect as long as you push somewhat evenly on each pedal ( left and right power is about the same) and you accelerate. Push harder and you accelerate harder.
However with a hand trike, both cranks are usually pointing the same way so in effect the motor sees a force on only half of the rotation and very little on the second half rotation, so never gets the signal to keep the power on and accelerate. In effect its like pedalling a conventional bike with one leg.
So in order to get around this problem I wanted to experiment with some options within the latest opensource Firmware available for the TSDZ2 motors, I just needed to make a special cable to connect the tiny SW102 screen to the motor and flash the firmware on the motor.


With that setup and running then next step was to calibrate the Torque Sensor in the motor.
Why do I need to calibrate the torque sensor?
each TSDZ2 motor has a torque sensor that meausrres the force applied, however its been recorded that the sensitivity of thease sensors is very different sensor to sensor, so you cannot assume that your own motor is reporting a force of say 10KG is actually seeing 10KG it could be more it could be less. Also the sensitivity is not linier and in order to have a smoth increase in power its work measuring the exact level the motor sees for a set on known weights. This way you can tell the motor how sensitive your torque sensor is and have it respond in an expected way.
So with a little help from Robin, we set about using a digital luggage scale on the crank and recorded the value the motor gave for a set of known weights for both cranks. ( yes it was different for each side)
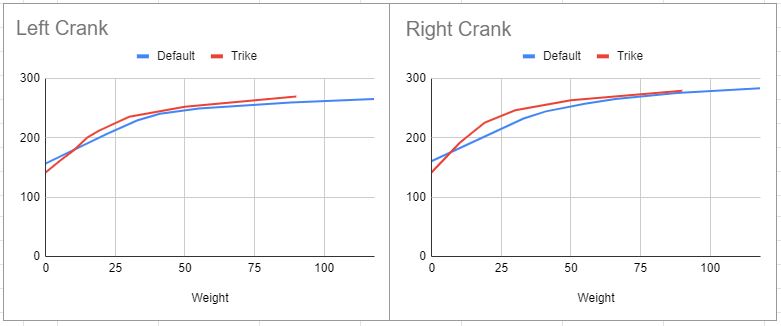
Interestingly this brand new motor had a very similar response to the figures used as default in the opensource firmware but these were very different to my own test motor and more sensitive on the right than the left, so it was worth getting it tuned in.
I also tuned on an option in the firmware to keep a minimum rotation on the motor when the motor had any load applied to help tune out the hunting we were seeing on the stock firmware. and then we were ready to give it a test ride.
Both Robin and I both had a go and I can report that it does indeed feel more responsive for sure. I still need to test how it feels on a hill and may consider both increasing the overall gain each assist level gives as well as maybe tricking it into thinking the right crank ( the one that’s in effect on backwards) into thinking its over sensitive. So that a small force of say 5KG is recorded into a much higher force 20Kg so it gives extra power on the return stroke where its most needed.
But I have to say so far its feeling very smooth and controllable and really wants to pickup speed!
Update:
I had the opportunity to tinker a little more with the settings and I noticed that at most I could only generate about 2/3 of the power on the cranks that I would be able to on a bike so I adjusted the assist gain to compensate. And wow what a difference! It will now easily pull under heavy load and had a bit more torque at the lower cadence’s.
I also started working on mounting the battery and 3D printed the first of four brackets to hold it steady on the rear axle.

Pingback: Adding a TongSheng TSDZ2 mid-drive motor to a Quickie Shark RT hand trike (Part1) – Empowered People